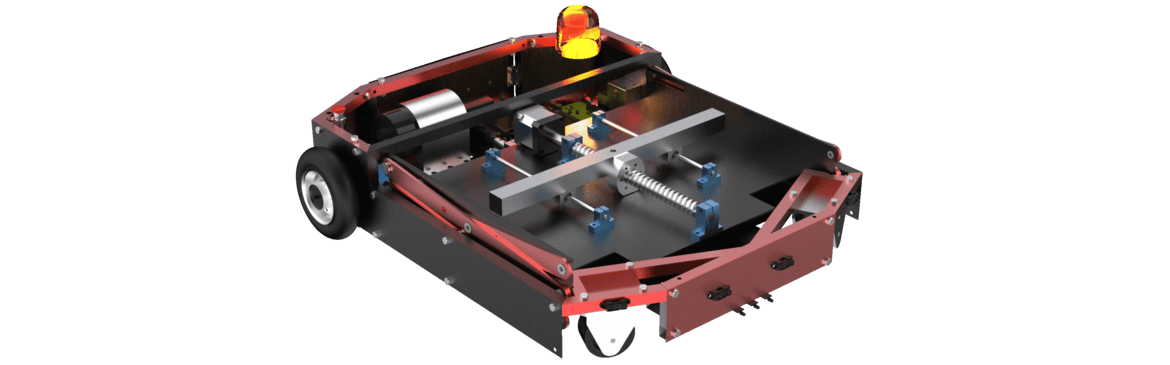
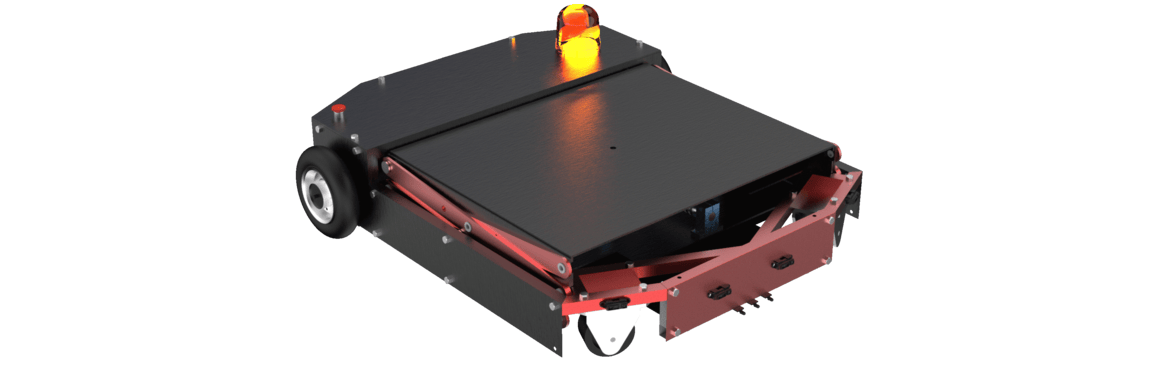
This project was developed as part of an academic challenge where we were tasked with designing and manufacturing an AGV (Automated Guided Vehicle) for use in Flextronics warehouses. The robot had to be capable of lifting at least 50 kilograms, raising a platform vertically by 50 centimeters, and extending horizontally by 10 centimeters to handle boxes, tools, and components.
The robot was designed to be semi-autonomous, using LiDAR sensors and other detection systems to localize itself and navigate through predefined routes or make dynamic decisions within the warehouse. Key functions included obstacle and human detection, autonomous routing, and effective task execution without collisions.
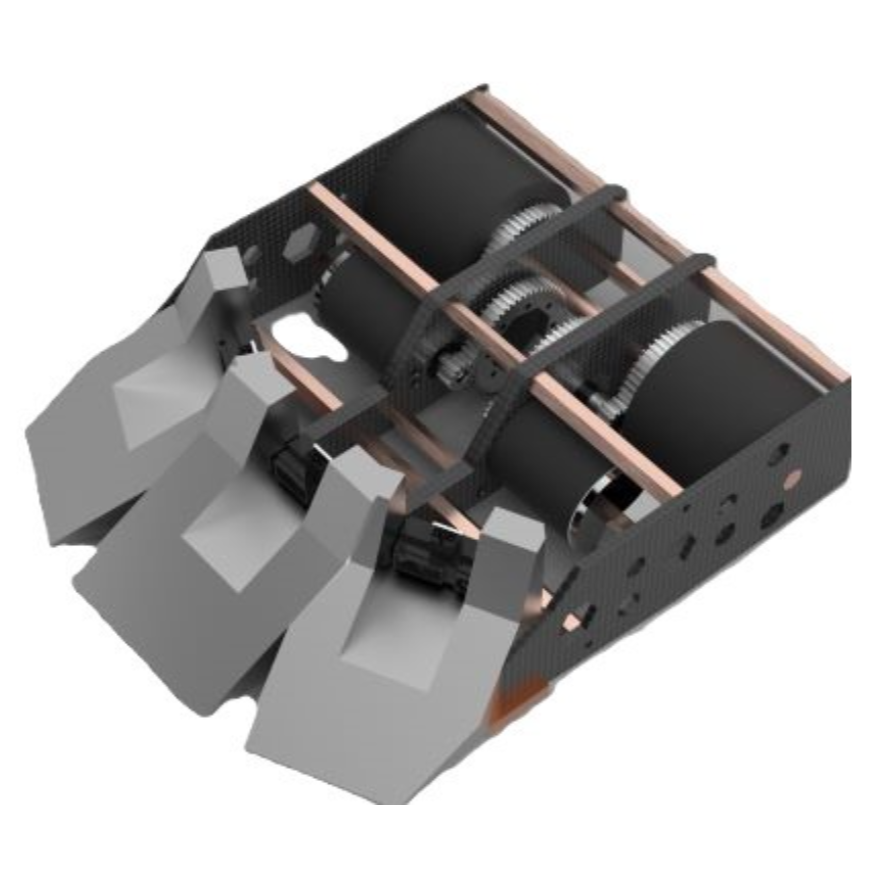
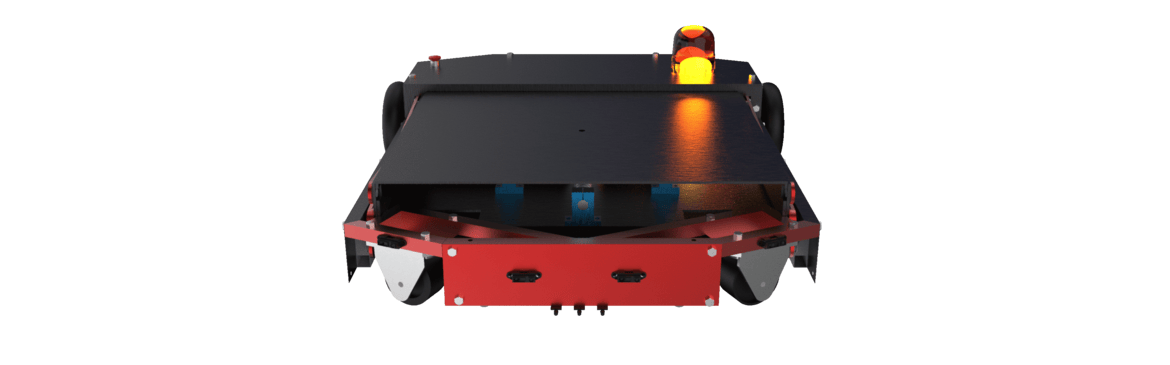
We programmed the system using an NXP S32K144EVB microcontroller, part of NXP’s S32K family designed for real-time automotive-grade embedded systems. Various sensors were integrated to map and interpret the surrounding environment, while the chassis was manufactured using steel and selected aluminum parts for a balance of strength and weight.
Unfortunately, due to the COVID-19 pandemic, the full manufacturing phase could not be completed. The final part of the project was executed virtually, with simulated mechanical tests and sensor integration in software environments to demonstrate feasibility and functionality.
| Visit: | AGV-Semestre - i |