RobocupRescue aims to increase awareness of the challenges involved in search and rescue applications, develop simulators to emulate search and rescue scenarios, develop intelligent agents and robots that are given the capabilities of the main actors in search and rescue scenarios, provide objective evaluation of robotic implementations in representative environments, and promote collaboration between researchers.
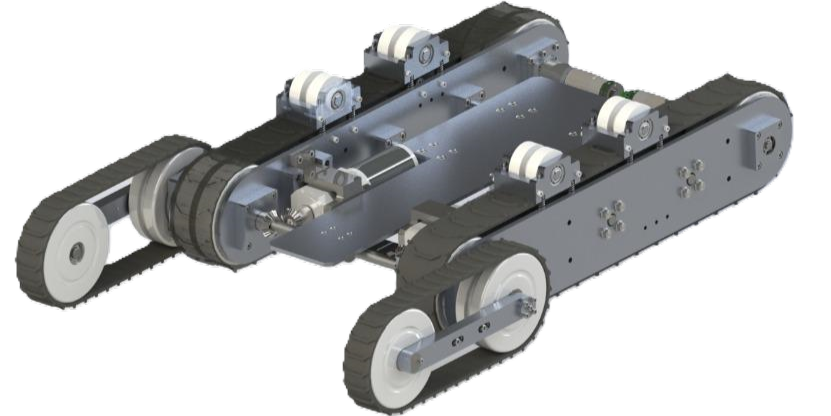
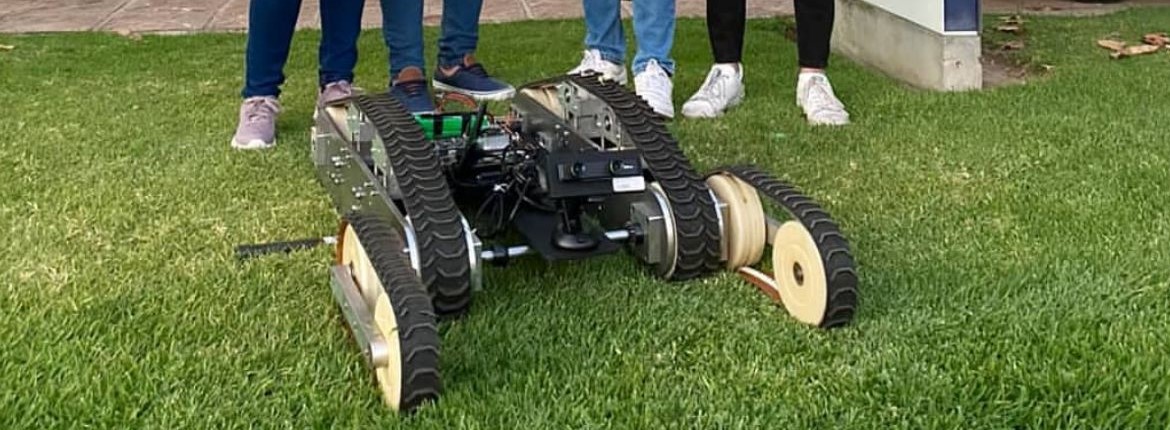
Led the mechanical design and systems integration (mechanical, electrical, and software) of a rescue robot for the RoboCup 2022. The robot was designed to navigate various terrains and developed under RoboCup 2022 guidelines, incorporating machine design, control algorithms, and computer vision.
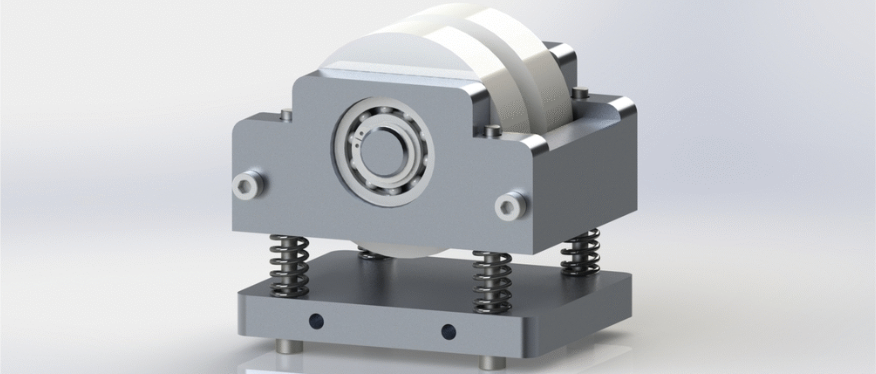
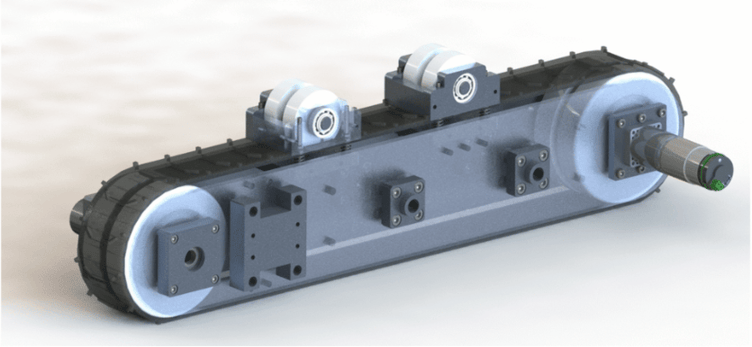
One of the main engineering challenges was to address issues with flat belt traction systems. Since modifying the existing architecture would have meant high costs, we designed a custom variable belt tensioning mechanism using aluminum sheets and standard components. The design ensured consistent 180° pulley contact for optimal traction, required no manual adjustments, and featured a spring-loaded system adaptable to uneven terrain—all while keeping the cost under $50 USD and following DFMA principles.
For perception and autonomy, we integrated an Intel RealSense depth camera to generate 3D point clouds, along with a 2D LiDAR for environmental mapping. All components were coordinated through the Robot Operating System (ROS), which managed real-time control of motors and sensor feedback. A Jetson Nano board served as the main controller, enabling efficient sensor fusion, decision-making, and actuation within a compact and cost-effective system.
| Visit: | robocup.org/rescue-2022 |